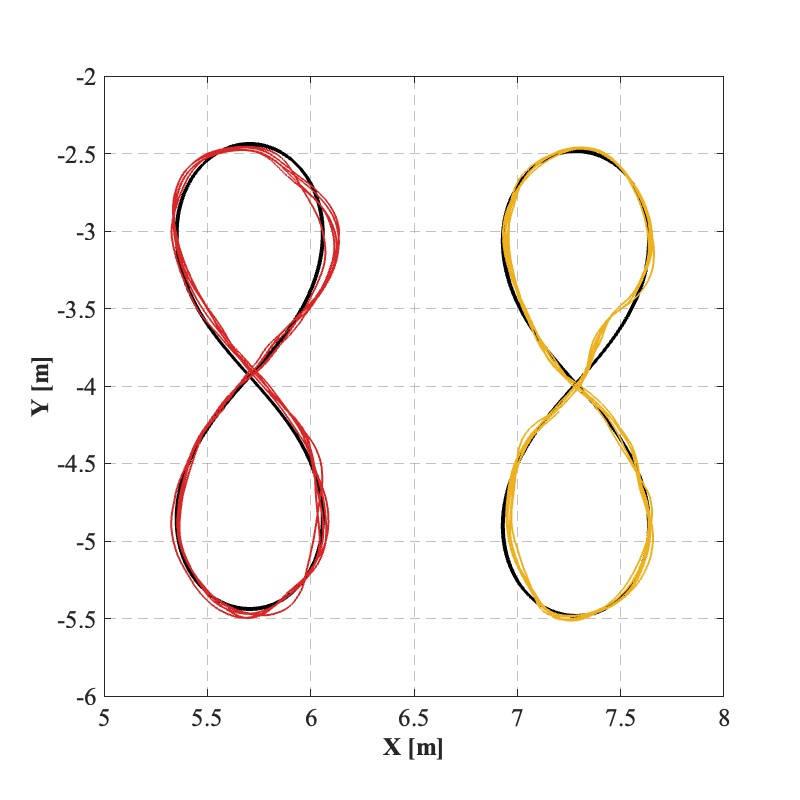
Baseline 1 (No Intentional Disturbance)
Front View
Rear View
Achieving robust generalization with rigorous stability guarantees remains the central challenge for the reliable application of learning-based control in complex physical systems.
To bridge the gap between offline training (Sim) and responsive online adaptation (Real) in unconstrained practical environments, this work introduces a framework that synergizes generative adversarial networks (GANs)-based structural priors with online Bayesian Gaussian process (GP) refinement, enabling rapid dynamic linearization and adaptive modeling.
Specifically, these offline priors provide a warm-start for the online adaptation, significantly enhancing its convergence speed and precision, while the GP's predictive variance provides the subsequent closed-loop controller with uncertainty awareness. Definitive convergence and approximation bounds are rigorously established for both components. Finally, physical multi-quadrotor cooperative payload experiments confirm the framework's superior reliability in disturbance-sensitive scenarios.
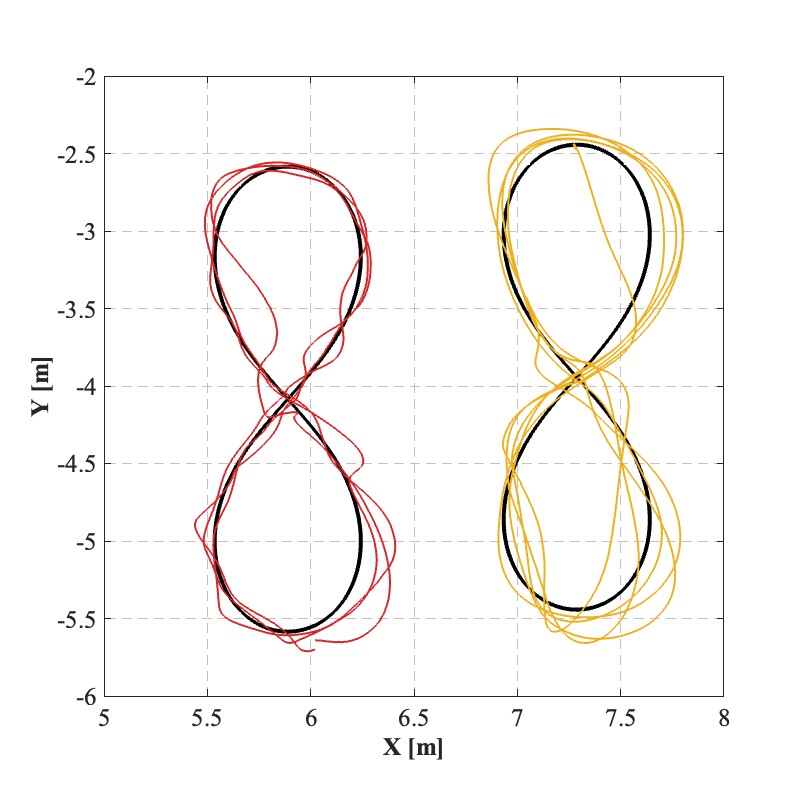
Front View
Rear View
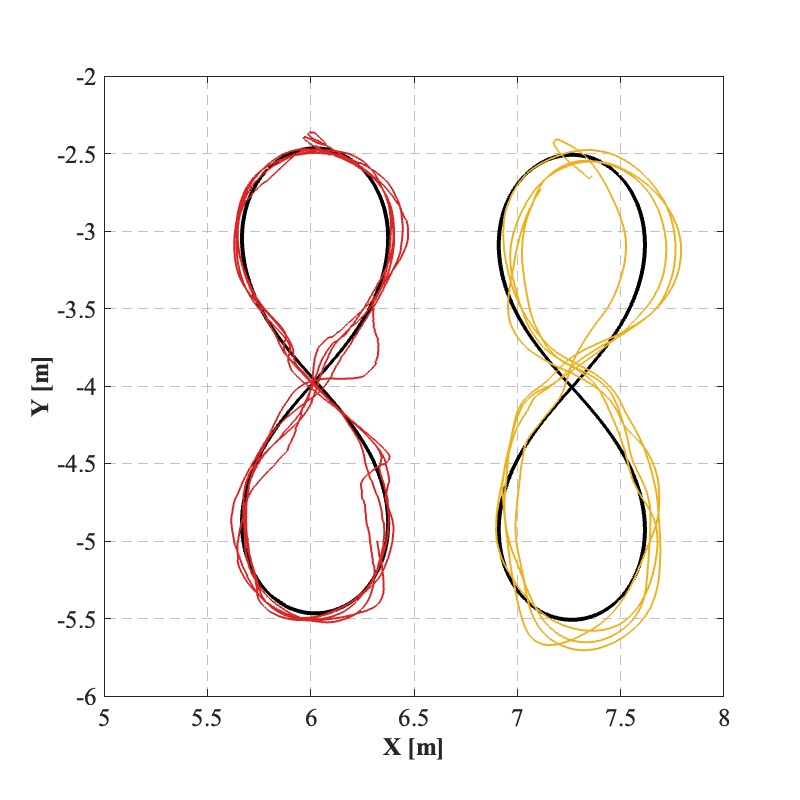
Front View
Rear View
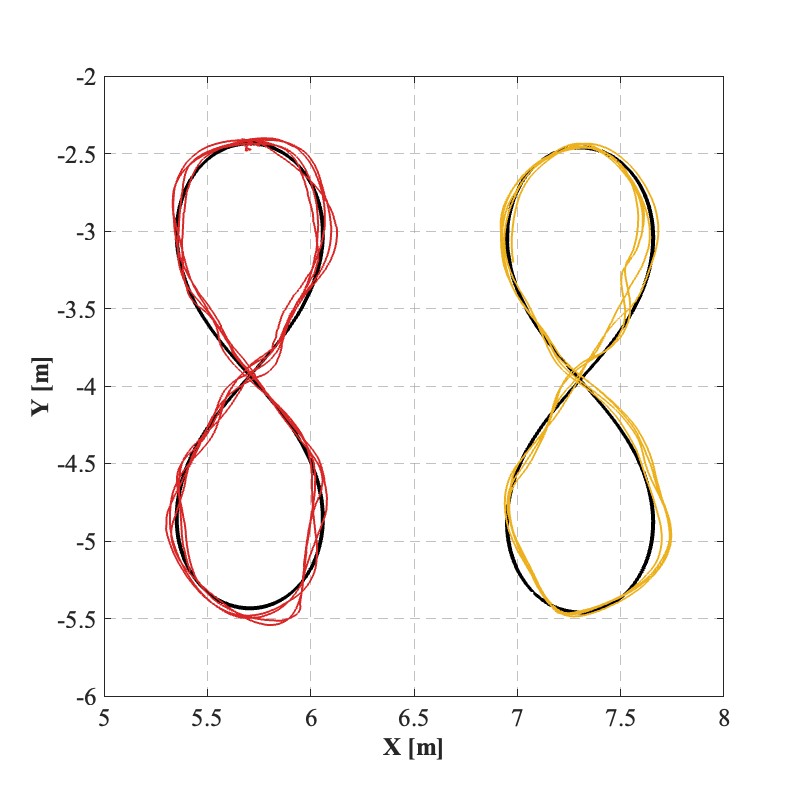
Front View
Rear View
Front View
Rear View
Front View
Rear View
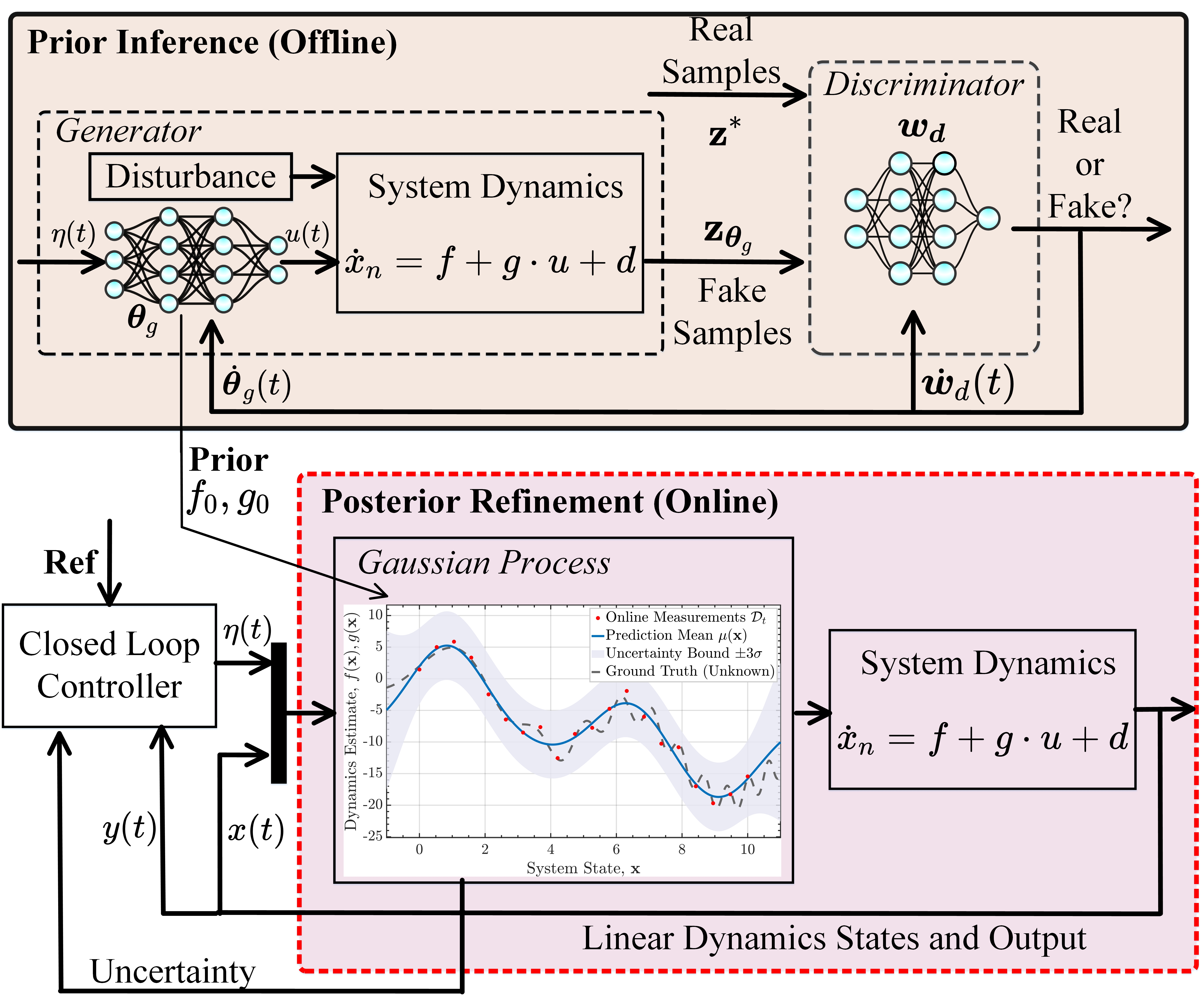
The offline phase utilizes GANs to extract structural priors f0, g0, initializing the linearization control law. Subsequently, the online Bayesian GP incorporates these priors as the baseline mean, iteratively refining the dynamics estimate against real-time data to ensure the system converges to the linear form. Ultimately, the closed-loop controller operates on these linearized dynamics to execute precise trajectory tracking, explicitly leveraging the predictive uncertainty quantified by the online Bayesian update.
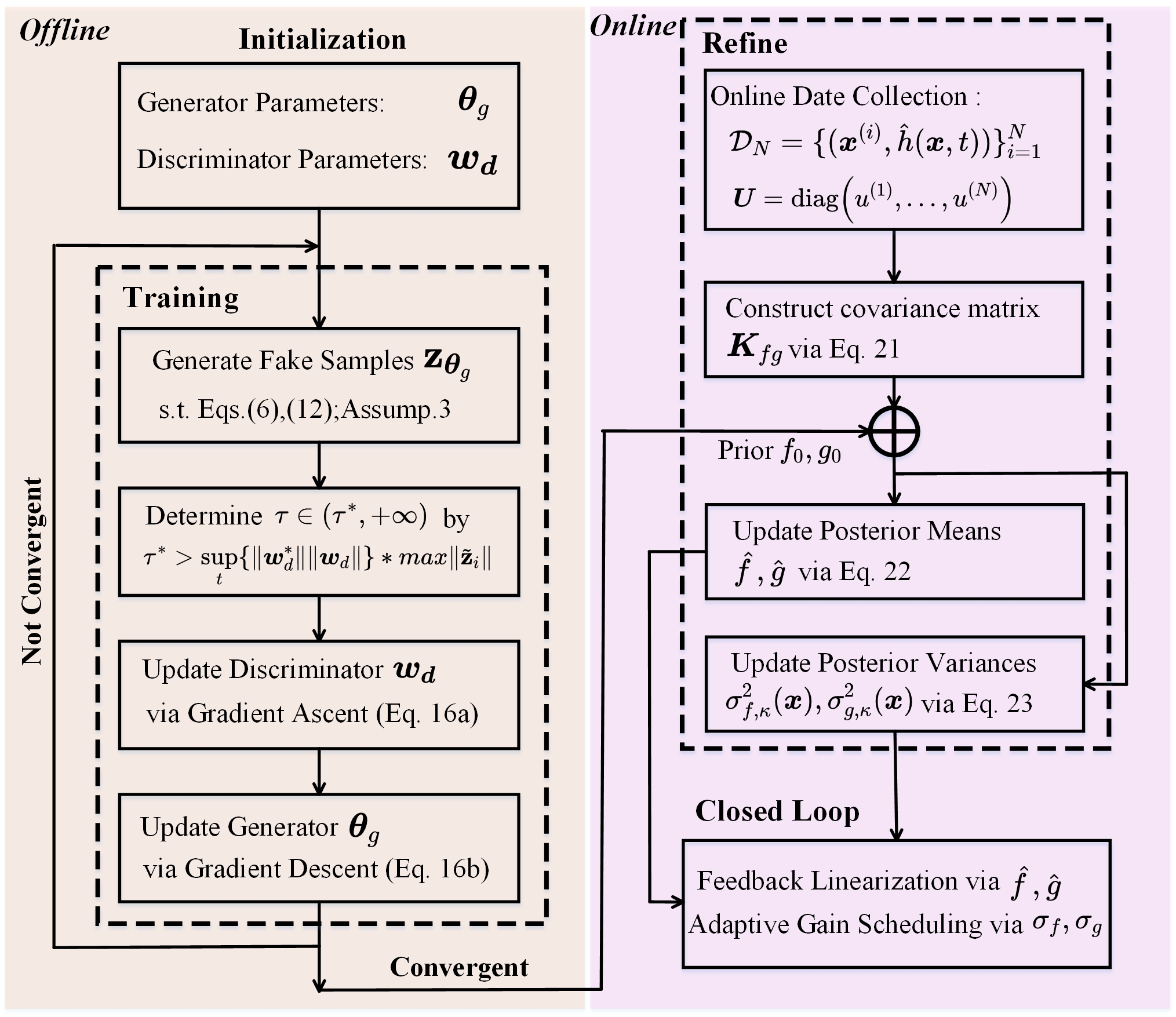
The offline phase establishes structural priors f0, g0 via adversarial gradient dynamics. During deployment, the online Bayesian phase continuously fuses these priors with real-time data to update posterior estimates, which subsequently drive the robust feedback linearization and adaptive gain scheduling.
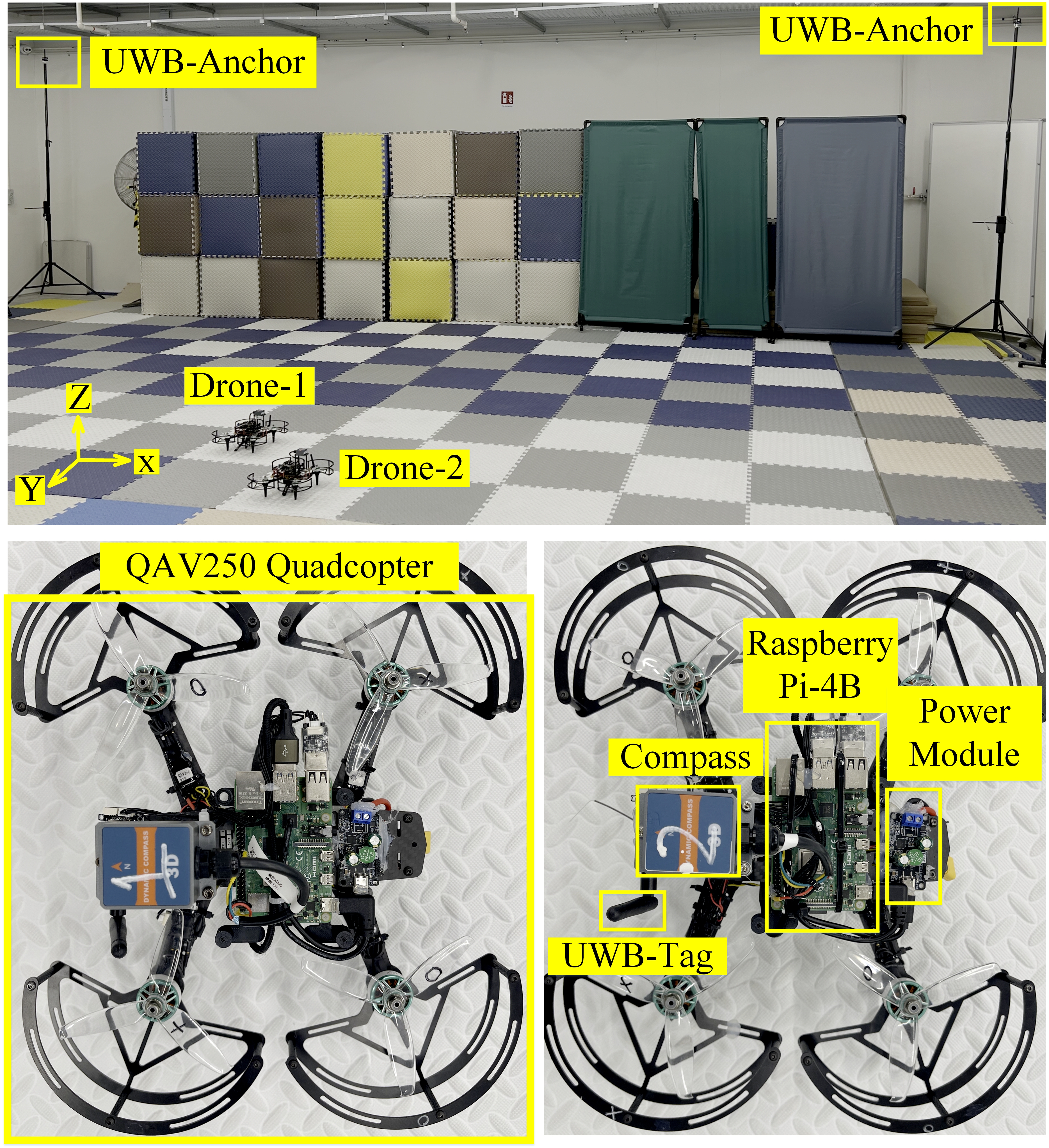
Hardware Architecture and UWB Positioning Setup